Advanced Vehicle and Powertrain Control
Minimize Energy Consumption through Energy-Efficient Control
For the past few years, the Argonne National Laboratory Vehicle & Mobility Systems Group (VMS) has been developing vehicle powertrain control algorithms to minimize energy consumption, including rule-based approaches, equivalent consumption minimization strategy (ECMS), dynamic programming, optimal control methods, Pontryagin’s minimum principle (PMP)… To quantify the impact of novel control algorithms, we have used extensive vehicle dynamometer test data to understand current state-of-the-art controls. The result is Autonomie, Argonne’s state-of-the-art vehicle energy consumption, performance, and cost system simulation tool, one of the only non-proprietary vehicle system simulation tools with control algorithms based on actual test data across a wide range of powertrains, technologies, and vehicle classes.
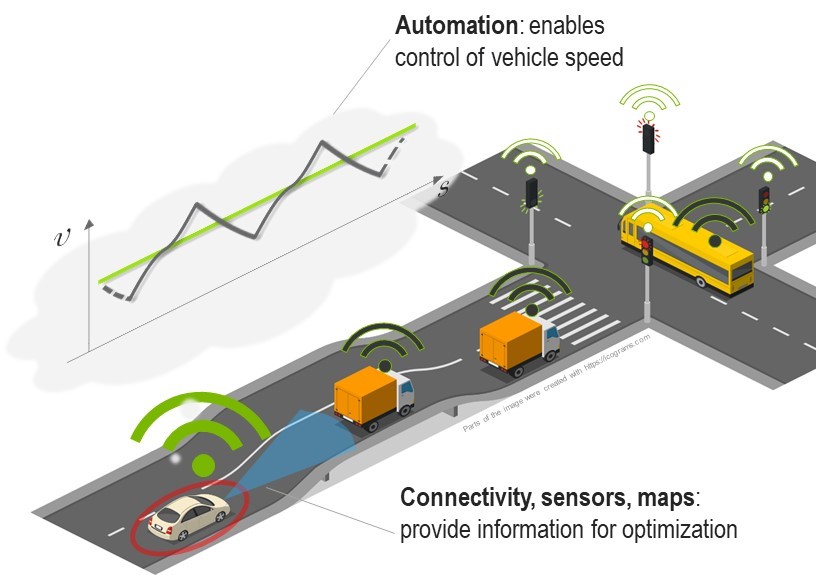
More recently, with the advent of connectivity and automation, combined with heightened knowledge of the environment, VMS has developed new control algorithms in RoadRunner, designed to simulate both powertrain and vehicle longitudinal dynamics, which includes vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) interactions. Currently, we’re focused on developing real-world implementable algorithms deployed in XIL.