Optimization
Transportation Optimization in POLARIS
Our research in transportation optimization focuses on developing scalable algorithms and decision-making frameworks that address the complexity of modern mobility systems. We design methods to enhance efficiency and resilience across a variety of transportation modes and services. This work supports federal agencies, metropolitan planning organizations (MPOs), transit operators, and industry partners in solving real-world routing, scheduling, and siting challenges. Our team integrates cutting-edge operations research, combinatorial optimization, and machine learning to address challenges in logistics, transit systems, autonomous mobility, and shared-use transportation. Recent studies span theoretical algorithm development, high-performance computing implementation, and applications using real-world data and constraints.
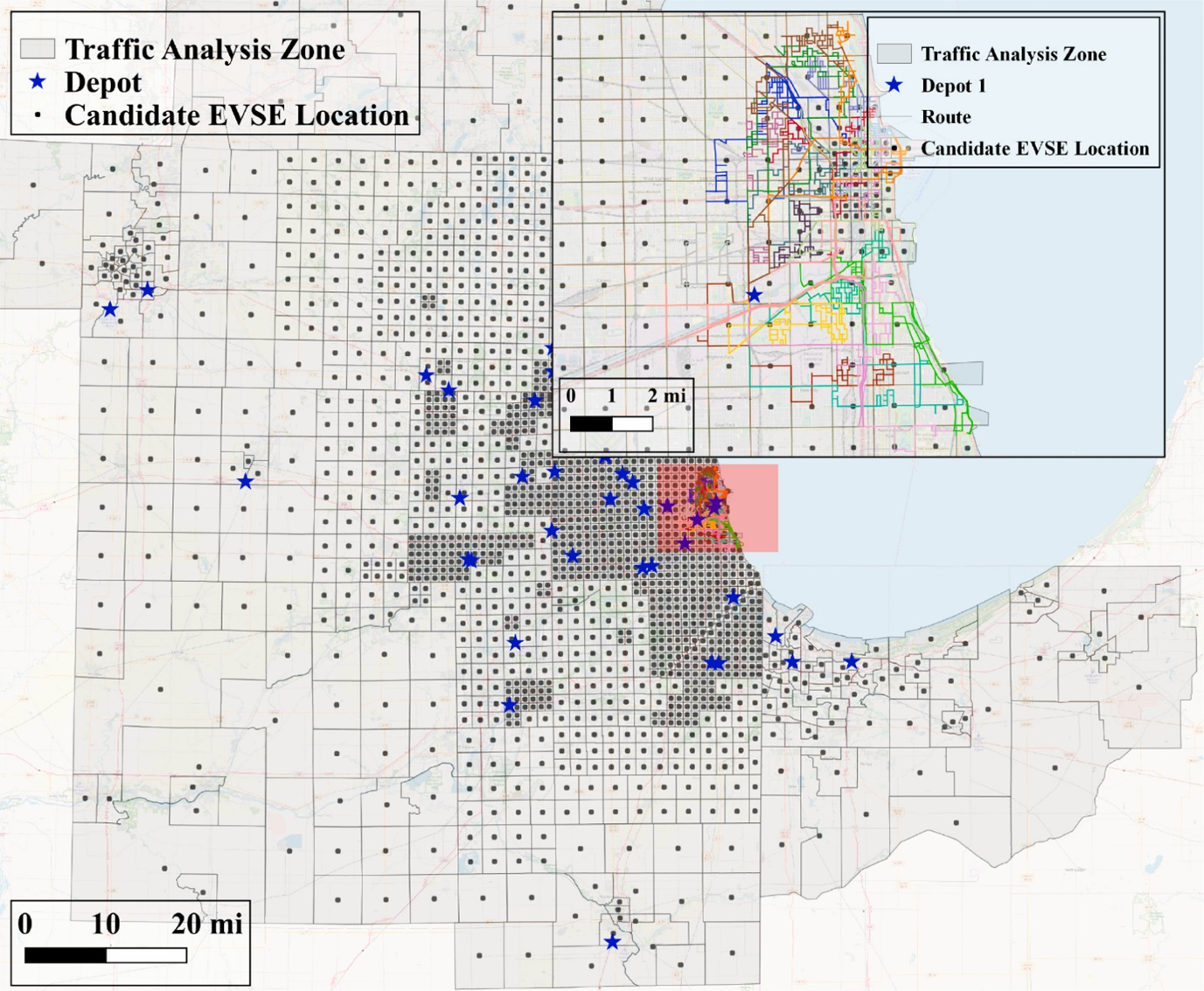 Figure 1. Example Chicago metropolitan area network with candidate electric vehicle supply equipment (EVSE) locations. The inset map on the top-right illustrates the red highlighted area that includes delivery routes represented with different colors.
Figure 1. Example Chicago metropolitan area network with candidate electric vehicle supply equipment (EVSE) locations. The inset map on the top-right illustrates the red highlighted area that includes delivery routes represented with different colors.
Current Areas of Research
- Vehicle Routing Problem (VRP) Variants: From classical VRP to time-constrained and energy-aware formulations, we develop heuristics, exact methods, and column generation approaches for efficient route planning.
- Urban Freight Delivery: We model and simulate parcel delivery systems under different fulfillment models, incorporating powertrain dynamics, customer time windows, and consolidation strategies.
- Dynamic Ride-Sharing Optimization: Our algorithms dynamically match riders and drivers in real-time, accounting for detours, vehicle capacity, and user preferences to improve system efficiency.
- Autonomous Vehicle Scheduling and Fleet Sizing: We optimize the operations of shared autonomous vehicle fleets, including dispatching, relocation, and right-sizing for long-term deployment.
- Drone Delivery Optimization: We design models that minimize energy consumption and delivery time for Unmanned Aerial Vehicles (UAVs) operating in constrained urban airspace, with applications in last-mile delivery.
- Electric and Diesel Bus Scheduling: We develop scheduling algorithms that integrate fleet heterogeneity, battery constraints, depot capacities, and operational continuity to optimize public transit operations.
- Electric Bus Charging Station Siting: Using the Problem of Locating and Allocating Charging Equipment (PLACE) framework, we identify optimal locations for electric bus chargers by accounting for constraints such as route coverage, charger availability, vehicle schedules, and depot energy limits.
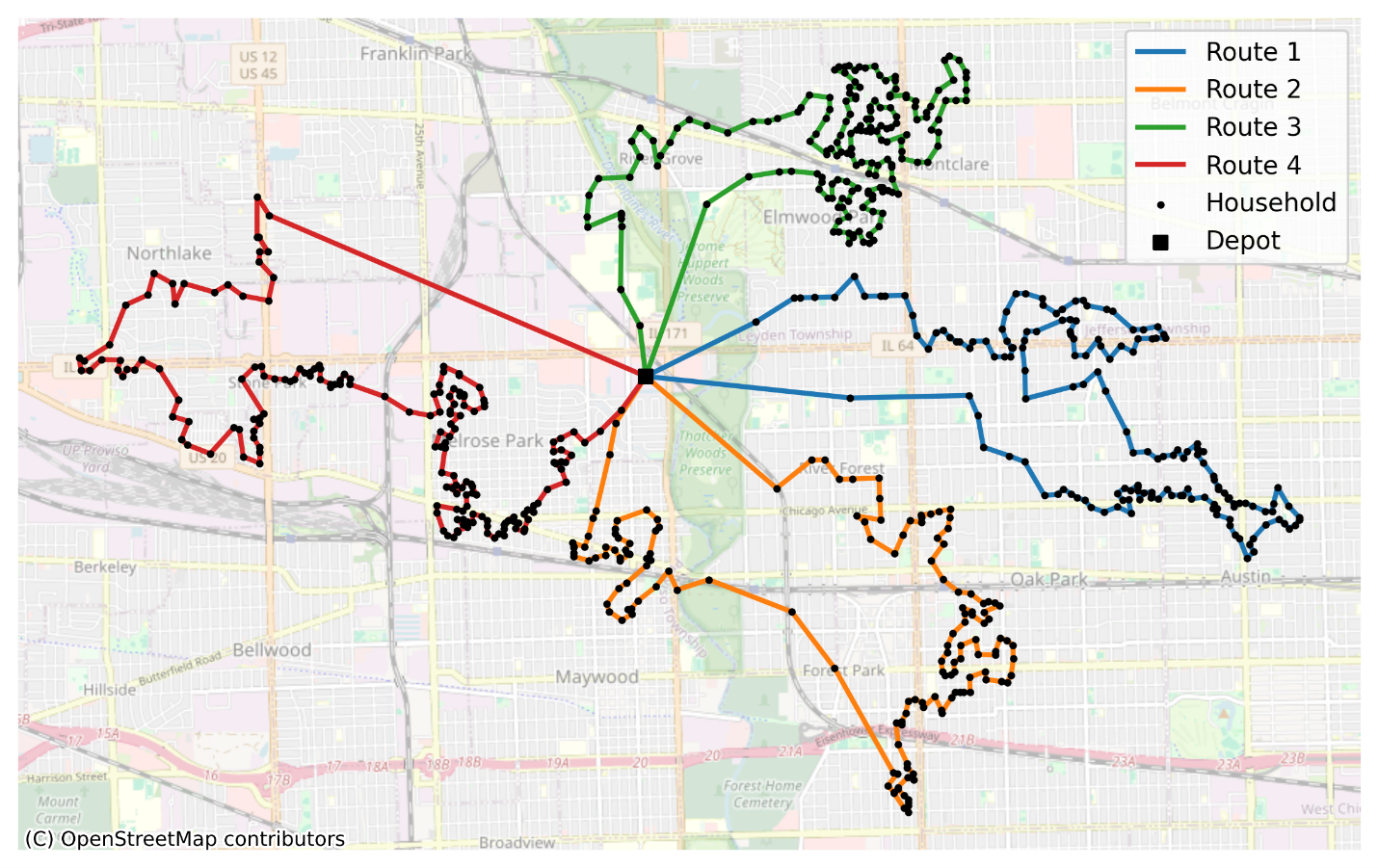 Figure 2. Example truck delivery routes (lines depict visiting sequence)
Figure 2. Example truck delivery routes (lines depict visiting sequence)
Research Tools & Capabilities
- Custom optimization engines with Gurobi, CPLEX, and open-source solvers
- Integrated Python/C++ frameworks for scalable simulations
- High-performance computing for large-scale VRP, scheduling, and siting problems
- Data pipelines for real-time mobility data, traffic APIs, and transit schedules