xIL Workflow
Quantify the impacts of energy-efficient connected and automated vehicles (CAV) with real vehicles in a virtual/mixed environment with RoadRunner.
For the past 20 years, the Argonne National Laboratory Vehicle & Mobility Systems Group (VMS) has been evaluating the impact of vehicle technologies at the system level. Using Autonomie, Argonne’s state-of-the-art vehicle energy consumption, performance, and cost system simulation tool, we’ve developed dedicated workflows to support the assessment of individual powertrain components (e.g., energy storage, electric machine, and engine) in an emulated vehicle. Leveraging the capability of our advanced model-based engineering resource (AMBER), a next-generation model-based systems engineering (MBSE) platform, you can quickly and efficiently build entire vehicle systems. Additionally, combined with Autonomie’s ability to model any powertrain or component technology or size, you can achieve rapid back-and-forth communication between simulation and component-in-the-loop development.
More recently, VMS has focused on connectivity and automation and the added control flexibilities enabled by knowledge of the environment to expand our XIL capabilities to include vehicle-in-the-loop (VIL). Centered around RoadRunner, designed to simulate both powertrain and vehicle longitudinal dynamics, workflows enable the evaluation of an actual vehicle in an emulated environment. Already, VIL workflows have been successfully demonstrated on multiple vehicles in multiple environments, including chassis dynamometer, on-road, on-track, and in multiple scenarios. Working with stakeholders, VMS continues to augment our VIL ecosystem by integrating additional third-party tools, scenarios, and environments.
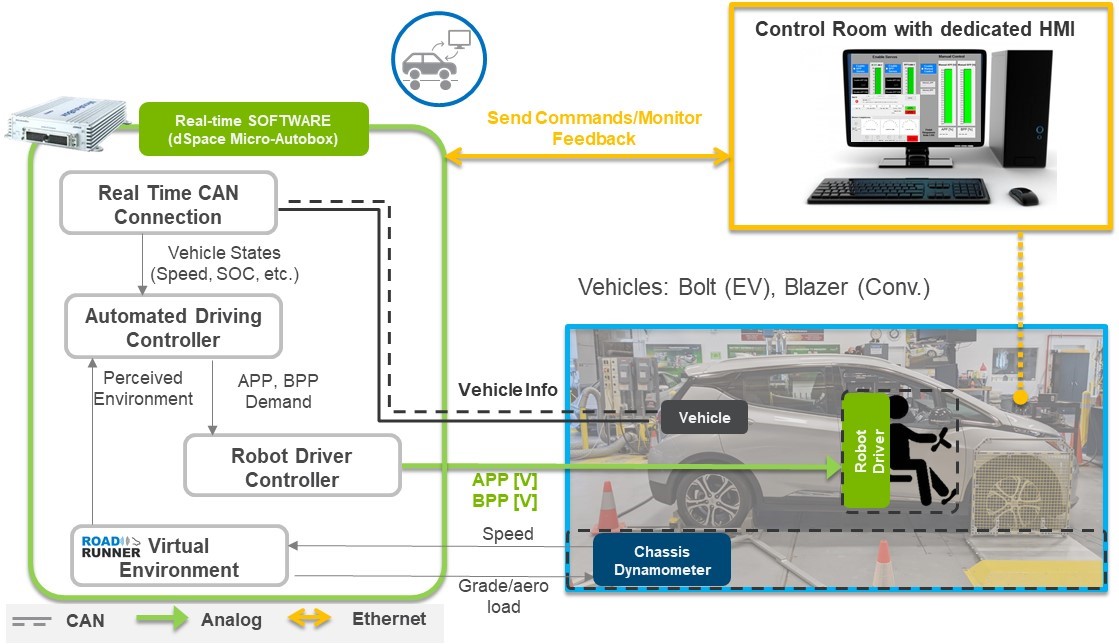 VIL Dynamometer set up at Argonne’s AMTL
VIL Dynamometer set up at Argonne’s AMTL