V2I Energy Savings on Track
Published: 2023 December
Connected Vehicles Can Save Up to 25% Energy, According to Study Using Virtual Traffic and Signals
Connected and automated vehicles (CAVs) can save up to 25% energy, according to an Argonne National Laboratory and Clemson University study that used a novel virtual traffic and signals approach.
Testing CAVs is essential to accelerating their market adoption. The number and complexity of scenarios demand a novel testing approach that quickly and efficiently assesses the impact of energy-efficient controls. In this case, researchers created a digital twin of a physical CAV and drove it through a virtual urban corridor where it reacted to virtual traffic and signals. The methodology included multiple steps, including pure virtual simulations, vehicle-in-the-loop testing (VIL, which is real vehicle driving in a simulated world), and fully physical road testing. Researchers developed the VIL platform to measure a physical CAV eco-driving performance on a physical test track. Read more about the framework in a journal article and conference paper.
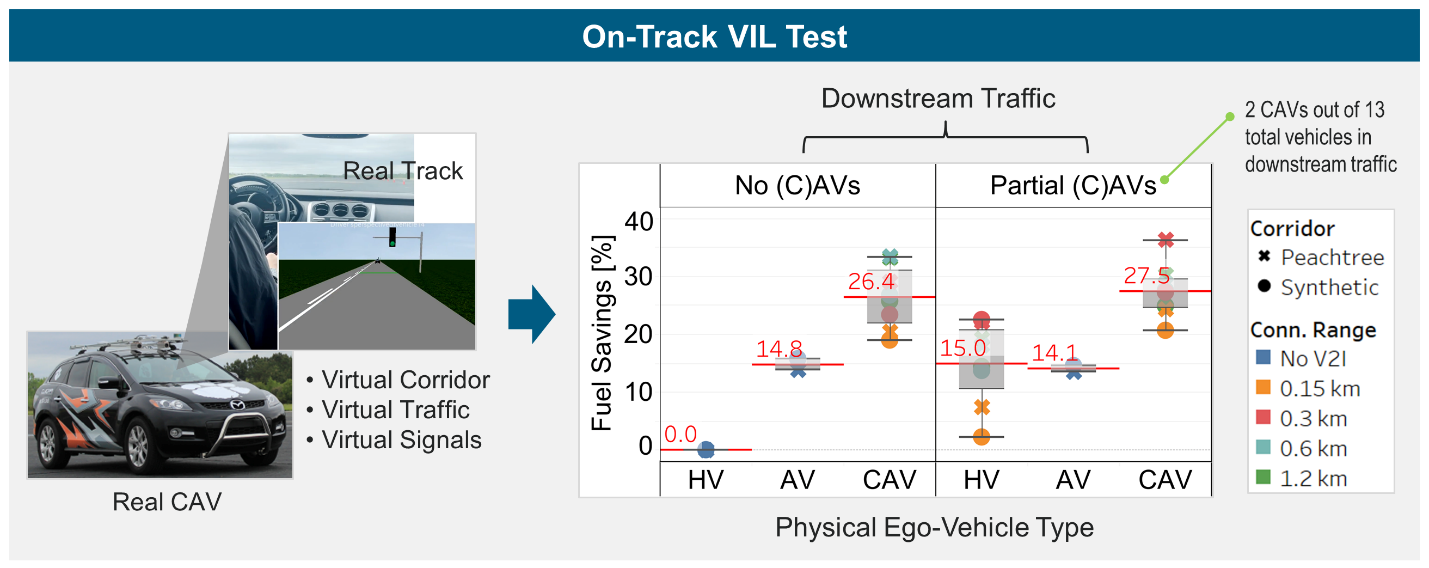
Results showed that CAVs, benefiting from a longer preview formed by vehicle-to-infrastructure (V2I) information ranges, achieved the smoothest driving—avoiding high-speeds and unnecessary acceleration and braking and allowing a larger distance gap from the preceding vehicle—and substantial fuel savings of up to 25% compared to human-driven vehicles (HVs). A longer connectivity range increased the driving smoothness of CAVs, resulting in higher fuel savings. AVs, without V2I information, still achieved smoother driving, reduced unnecessary braking, and yielded fuel savings of up to 15% over HVs. Additionally, the study demonstrated that downstream CAVs improved traffic light approaches for following vehicles, providing additional fuel benefits to both CAVs and HVs.
The experimental vehicle was a Mazda CX-7 retrofitted to add driving automation capabilities. A total of 60 VIL experimental tests were performed on the track at the International Transportation Innovation Center in Greenville, S.C., by varying the following parameters:
- Downstream traffic (13 virtual vehicles) conditions: 1) all HVs and 2) CAVs positioned 1st and 11th in the string
- Strategies for the experimental vehicle: 1) human driver model, 2) unconnected AV control, and 3) CAV eco-driving control using V2I information
- V2I connectivity ranges for CAV scenarios: 1) 0.15 km, 2) 0.3 km, 3) 0.6 km, and 4) 1.2 km
- Routes: 1) a synthetic urban corridor, and 2) a real-world urban corridor on Peachtree Street in Atlanta
Using V2I technology and eco-driving controls can enhance energy efficiency and reduce energy consumption, leading to lower emissions. As more CAVs are deployed on the roads, the potential for energy savings and reduced emissions will increase.
The study was funded by the US Department of Energy (DOE) Vehicle Technologies Office (VTO) Energy Efficient Mobility Systems (EEMS).