Energy Efficient Connected and Automated Vehicle control
Published: 2021 November
XIL testing confirms that up to 20% in energy savings can be achieved, compared to a baseline control with RoadRunner.
Novel eco-driving connected and automated vehicle (CAV) controls were deployed across multiple real vehicles using XIL, both on a dynamometer at Argonne National Laboratory and on track at Automotive Center for Mobility (ACM), in partnership with Michigan Technological University. Using RoadRunner, designed to simulate both powertrain and vehicle longitudinal dynamics, the controllers demonstrated significant energy consumption improvements across many scenarios. Using a newly developed XIL process centered around RoadRunner the Argonne National Laboratory Vehicle & Mobility Systems Group (VMS) was able to successfully confirm the simulated energy consumption predictions across more than 20 scenarios deployed on two vehicles (Chevrolet Bolt and Chevrolet Blazer), each with different powertrains (conventional and BEV), in two different environments (vehicle dynamometer and on-track).
In addition to validating the initial RoadRunner simulation results, the newly developed XIL automated process demonstrated a repeatability within one percent on the dynamometer in terms of travel time and energy consumption.
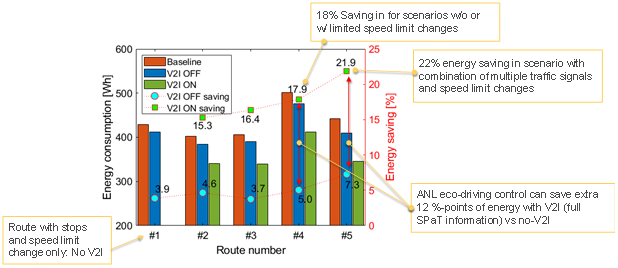 Energy Savings for a Lead Vehicle (GM Bolt) w/ Speed-only Eco-Driving and V2I-Enabled Eco-Approach (xIL testing performed on Argonne AMTL)
Energy Savings for a Lead Vehicle (GM Bolt) w/ Speed-only Eco-Driving and V2I-Enabled Eco-Approach (xIL testing performed on Argonne AMTL)