Autonomie Suite
Simulate state-of-the-art vehicle energy consumption, performance, and cost with Autonomie.
Autonomie is a state-of-the-art vehicle system simulation tool used to assess the energy consumption, performance, and cost of multiple advanced vehicle technologies across
- Vehicle classes (from light- to medium and heavy-duty),
- powertrains (from conventional to hybrid electric vehicles [HEVs], plug-in hybrid electric vehicles [PHEVs], battery electric vehicles [BEVs], and fuel cell electric vehicles [FCEVs]),
- Component technologies, and
- Control strategies.
Autonomie is the only commercial software to include vehicle control algorithms developed from vehicle dynamometer test data across dozens of powertrain configurations. Additionally, Autonomie provides full access to the component models and control algorithms—users can create or update vehicles, components, and control.
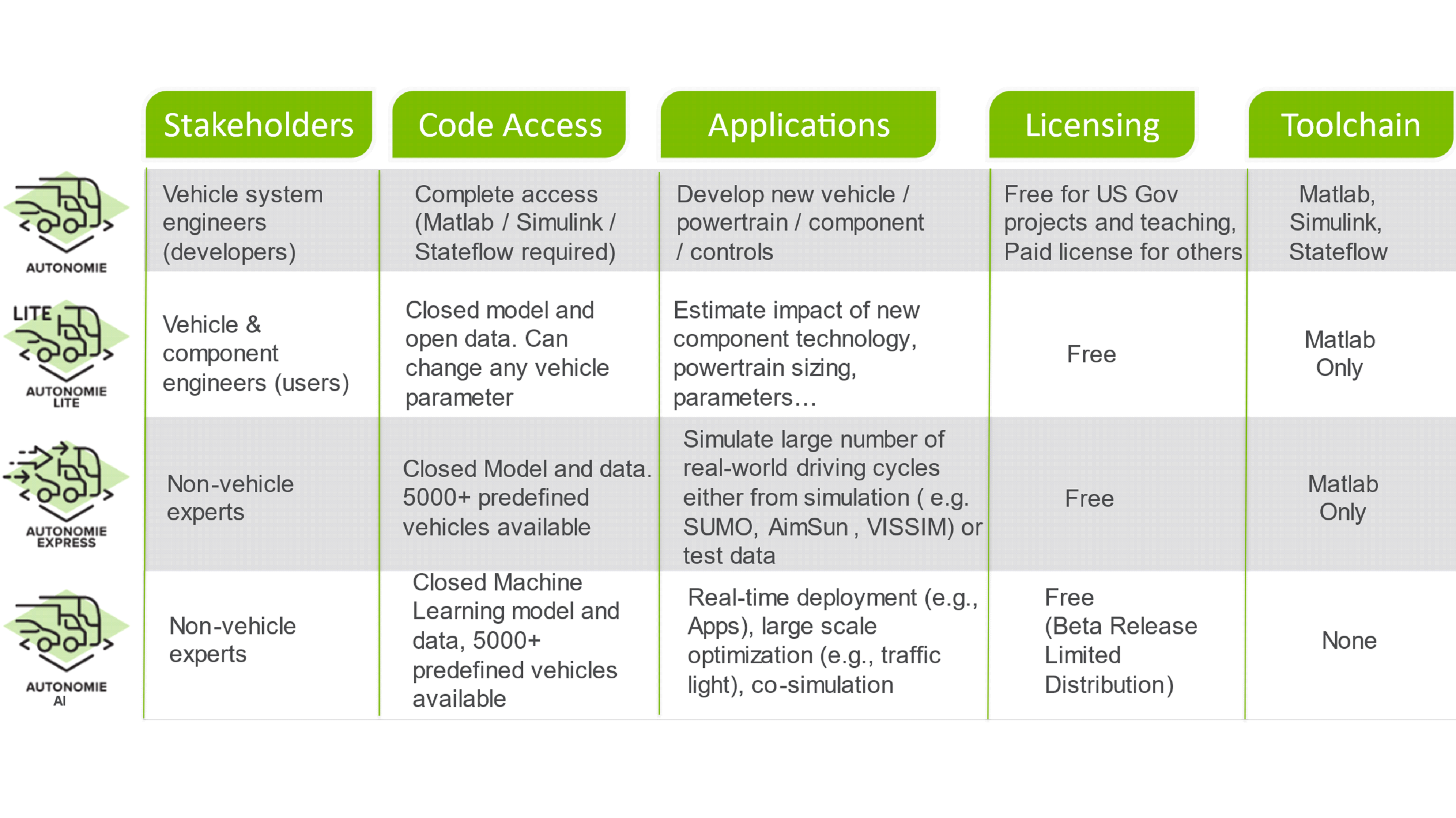
In order to support diverse set of users, multiple versions of Autonomie have been developed:





Questions?
Contact us to learn more about Autonomie, request a demo, and explore licensing options. For legacy versions of Autonomie (Rev16SP7 and earlier), please contact VMS Licensing