
SVTrip
Generate naturalistic vehicle speed profiles with SVTrip.
Developed by the Argonne National Laboratory Vehicle & Systems Mobility Group (VMS), stochastic vehicle trip prediction (SVTrip) uses high-level route information to generate naturalistic vehicle speed profiles following training on large data sets of recorded driving data.
Here’s how it works:
- Users define a trip on a digital map (e.g., HERE maps) or a travel simulator (e.g., POLARIS), by providing origin, destination, and waypoints;
- SVTrip then extracts a macroscopic definition of the trip with attributes such as speed limit, travel time, road class, and intersection type for each segment of the trip; and
- SVTrip sequentially generates a time-indexed speed signal that fits the attributes of each segment.
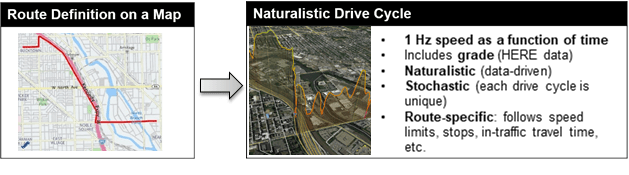 Fig.1 - Route To Cycle
Fig.1 - Route To Cycle
SVTrip highlights include:
- Data-driven: SVTrip models how people drive by training on very large data sets of recorded driving data. Every transition in speed that occurs in the output has been observed in the real-world data set. A combination of Markov chains and machine learning is used to train on thousands of hours or real-world driving.
- Naturalistic and stochastic: the algorithms include the randomness inherently associated with human driving. the output of multiple runs/generations of SVTrip with the same route target as an input renders a different result each time. The result is naturalistic because it is made of speed transitions that actually occurred in the training data set.
- Route-specific: each speed profile SVTrip generates is particular to the route provided as input. For each segment of the route, the algorithm identifies the most relevant subset of data (e.g., high-speed highway driving) and generates a speed trace whose attributes match the target attributes of the segment (e.g., segment distance, initial speed, travel time, speed limit, stop, or not at the end).
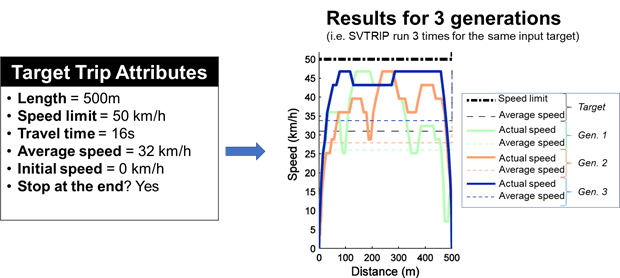 Fig.2 - Target Trip Attributes
Fig.2 - Target Trip Attributes
Application examples include:
- Drive cycle generation: when developing and improving powertrains, automotive engineers rely heavily on drive cycles to (1) predict fuel consumption or electric range; (2) predict aging of the components (e.g., batteries or transmission); (3) appropriately size the components of the powertrains; and (4) predict or account for other variables.
- Data-augmentation for mesoscopic travel simulators: SVTrip is used to generate naturalistic drive cycles from the outputs of POLARIS, our high-fidelity predictive transportation system model, enabling linkage with Autonomie, Argonne’s state-of-the-art vehicle energy consumption, performance, and cost system simulation tool, as part of the Systems and Modeling for Accelerated Research in Transportation (SMART) Mobility workflow.
- Generation of speed horizon: a stochastic estimation of future speed can be used by control optimization algorithms to improve energy consumption or other metrics.
Questions?
Contact us to learn more about SVTrip, request a demo, and explore licensing options.