What's New In Autonomie 2025
This version was validated from Matlab R2018a to Matlab R2024b
Training Videos
- Running an Autonomie Vehicle - Video
- Editing and Running an Autonomie Vehicle - Video
- Find other Training Videos on AMBER/Autonomie Here
New Features
Optimization Workflow
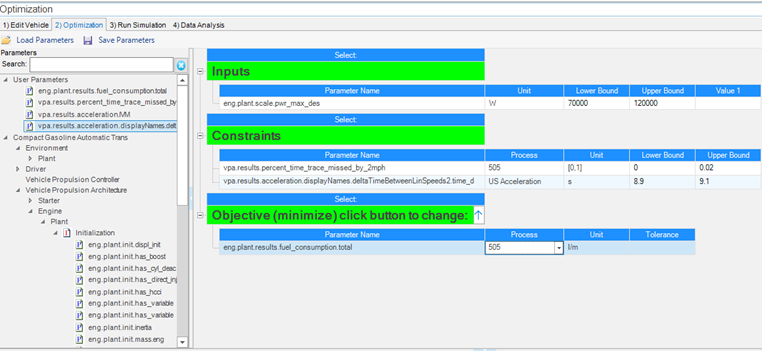
The new optimization workflow can be used to optimize control parameters or size powertrain components by either using the pattern search algorithm from Mathworks global optimization toolbox or POUNDER which can be found at the site: https://www.mcs.anl.gov/~wild/codes/pounderaut/index.html. Users choose input parameters to adjust, any vehicle parameters for constraints and a parameter as an objective.
 Optimization Workflow
Optimization Workflow
Resolved Issues
User Interface
- Import test data issue fixes, loading parameters from templates, displaying parameters in tables
- Fixed issues with minimize signals from context menu
- Fixed issues with the Trip Editor plotting
- Fixed issue with parameters being duplicated in the Parameters table for the Edit Vehicle and Edit and Run a Vehicle workflows
Matlab API
- Create a way to quickly get a flat list of files and parameters in a vehicle that can be loaded into a table or written to a csv file.
- pxfApplicationEnvironment add a method to get a library path by name – getLibraryPathWithName
env = pxfApplicationEnvironment.createFromCurrentProject(); env.getLibraryPathWithName('AutonomieEnergy') - Add minimize to workspace to the amber API
sys = pxfSystem.createInitUsingFileName('conv_midsize_si_8spd_au.a_vehicle'); sys.minimizeLoggedSignals() - Created a pxfProject class to make it easier to manage them from the command line
pxfProject.changeInteractive - Add parquet file format to the options to save
cyc = pxfRunCycle();
cyc.saveSinglePrecisionSignals = true - Parametric study issues on Matlab R2024b, default value issues with vectors, ordering issues
Autonomie Model Library Updates
- Silverado MY20 and Bolt MY20 data sets have been added from the AMTL to be used as examples with the import test data utility. See the section on importing test data.
- A new feature has been developed to concatenate drive cycles in order to emulate the vehicle’s driving patterns and battery charging patterns during a simulated workday (instead of a single trip). To achieve this, the BEV model and workflow were updated to allow charging events during single or connected trips. This was developed in collaboration with Cummins to support the EEMS-funded project. These new capabilities will benefit projects focused on smart routing and smart control, ensuring sufficient refueling/charging stops in use cases considered for BEVs/PHEVs.
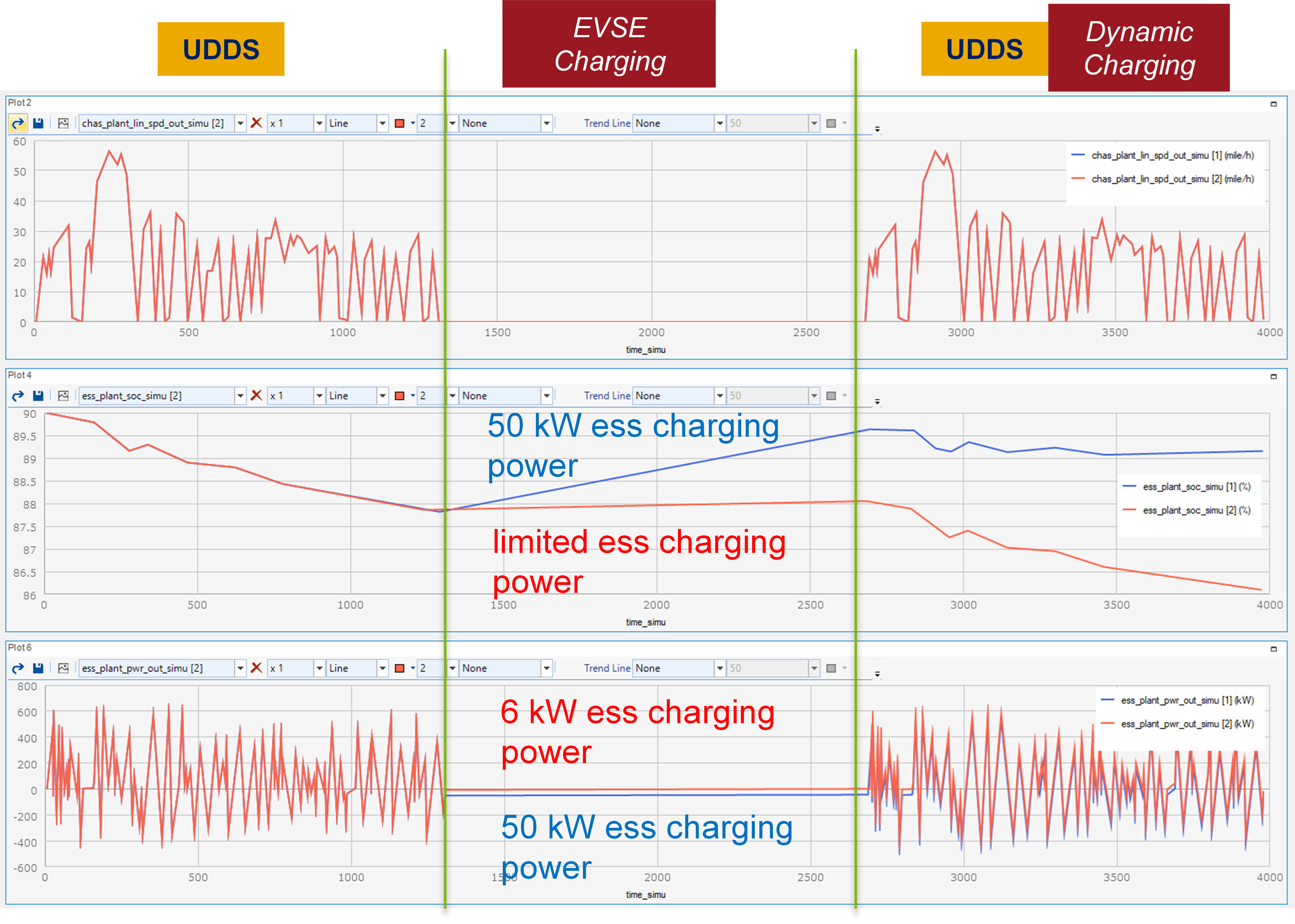 Battery Charging Comparison when Parked on Concatenated Trips
Battery Charging Comparison when Parked on Concatenated Trips
- The Power Split HEV/PHEV model has been updated with a gearbox model using a one-way clutch, along with modifications to the vehicle propulsion controller model. This model was developed based on a benchmarking study of Toyota’s HEV powertrain system, and the developed model and controller have been integrated to the Autonomie library. The addition of the one-way clutch allows the generator to provide propulsive torque during EV mode driving and enables optimal motor control for improved driving performance.
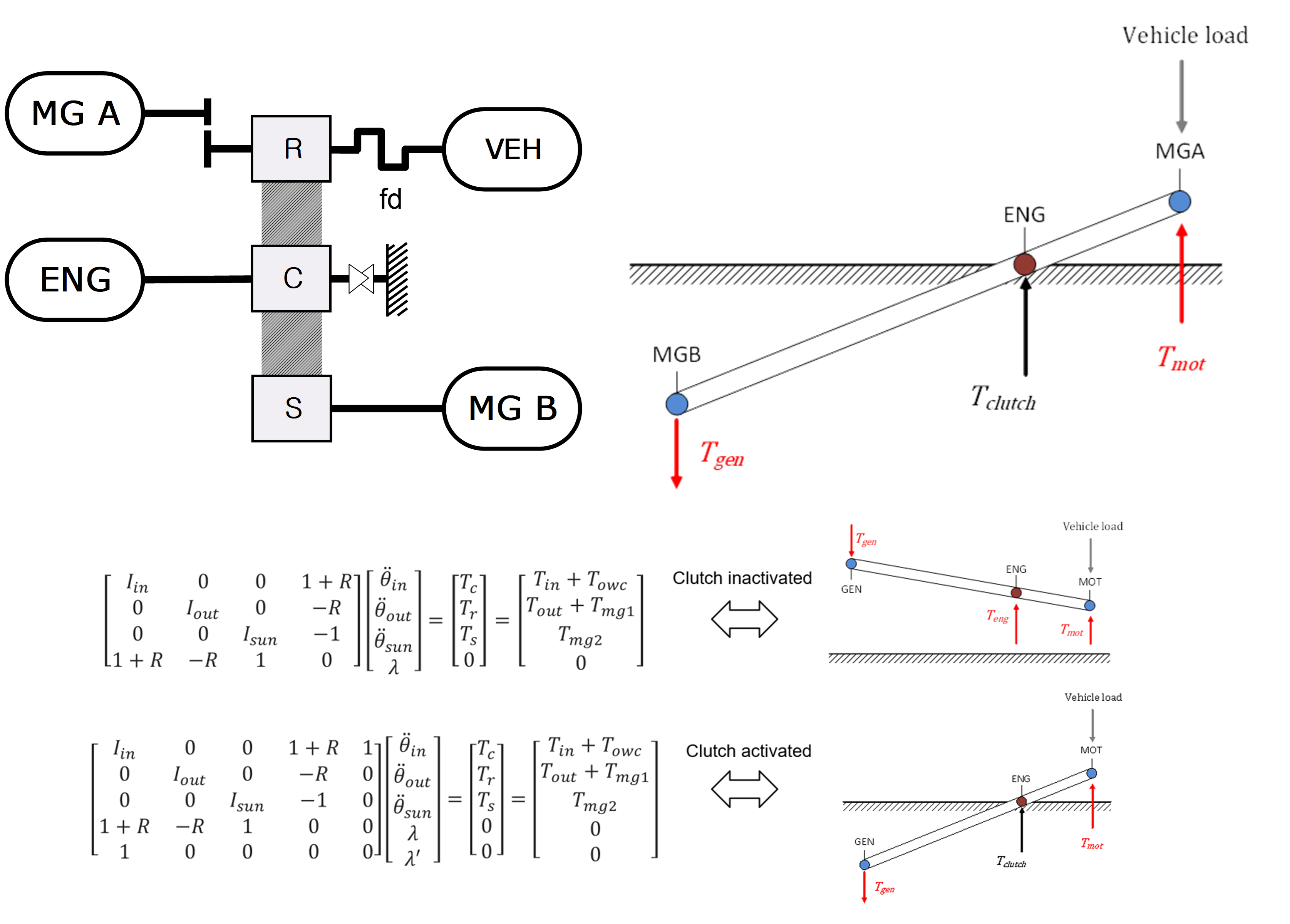 Power Split Planetary Gear Equations with a One-Way Clutch
Power Split Planetary Gear Equations with a One-Way Clutch
- The automatic transmission controller for LD vehicles has been improved based on analysis from a shifting benchmark study. A new transmission control algorithm was analyzed through the LD vehicle shifting benchmarking study, and the shifting algorithm was modified to allow skip shifting during upshifts or downshifts. In the previous controller model, scenarios requiring multiple gear changes involved step-by-step shifting, which could fail to consistently reflect real-world driving conditions. The revised transmission control model provides a more consistent representation of real-world driving scenarios and has been validated through comparisons between real-world driving data and simulations.
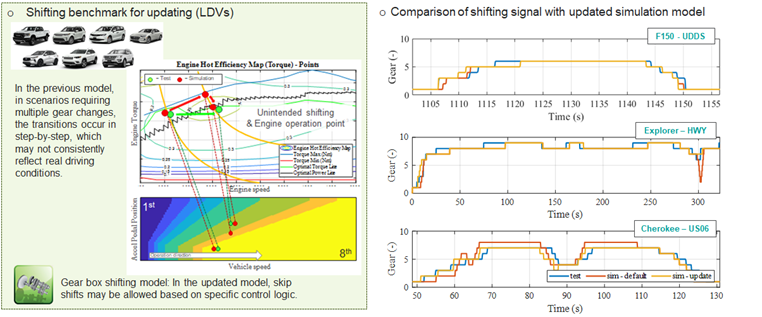 Comparison Between Simulated and Test Data for updating Shifting Strategy
Comparison Between Simulated and Test Data for updating Shifting Strategy